【研究紹介 #03】人間の生活支援を可能とするロボット

原田・髙畑・長・椋田研究室の研究を紹介するインタビュー連載。第3回となる今回は、人間の生活を支援するロボットの研究を手がける髙畑 智之(たかはた ともゆき)先生に話をききました。
髙畑 智之
東京大学 先端科学技術研究センター 特任准教授
“ロボットによる生活支援” をめざした、装置・要素技術研究
―まずは、先生の研究テーマを教えてください。
髙畑:わたしの研究の大きなテーマは、“人の生活を助けるロボットをつくる” ことです。
このテーマのもと、例えば電動車椅子のような乗りものをつくる研究をしたり、センサーを使ってさまざまな情報を計測する「センシング」のような技術の研究をしたりと、幅広いトピックに取り組んでいます。
―「ロボットによる生活支援」を研究テーマに選んだのはなぜですか?
髙畑:博士課程を修了した後に、室内での移動を支える椅子型ロボットの研究プロジェクトに参加したことが大きなきっかけになっています。

このプロジェクトは少子高齢社会の課題をロボット技術で解決しようというもので、高齢者だけでなく子育て世代の支援もめざしていたところが印象的でした。
「どんなロボットがあれば誰の助けになるのか」「ロボットをつくったその先で社会がどう変わっていくべきか」という対話が常に生まれており、研究を進めるなかで、人やその生活に対する “支援” について自身の考えを深められる場面が多々あったのです。
もともと人の役に立つ、誰かに喜ばれるような研究がしたいという思いがあったことから、この生活支援というテーマに惹かれ、研究者としてこの道に進むことを決めました。
わたしの研究は、企業で行われる研究のように2,3年後の近い将来役立つものではないかもしれませんが、10年後、20年後に誰かの支えになればいいなと考えながら日々取り組んでいます。
研究の喜びは、“あったらいいな” を形にして誰かの役に立てること
―今取り組んでいる研究内容を、くわしく教えてください。
髙畑:現在は、主に電動車椅子とカメラをつくる研究を行っています。
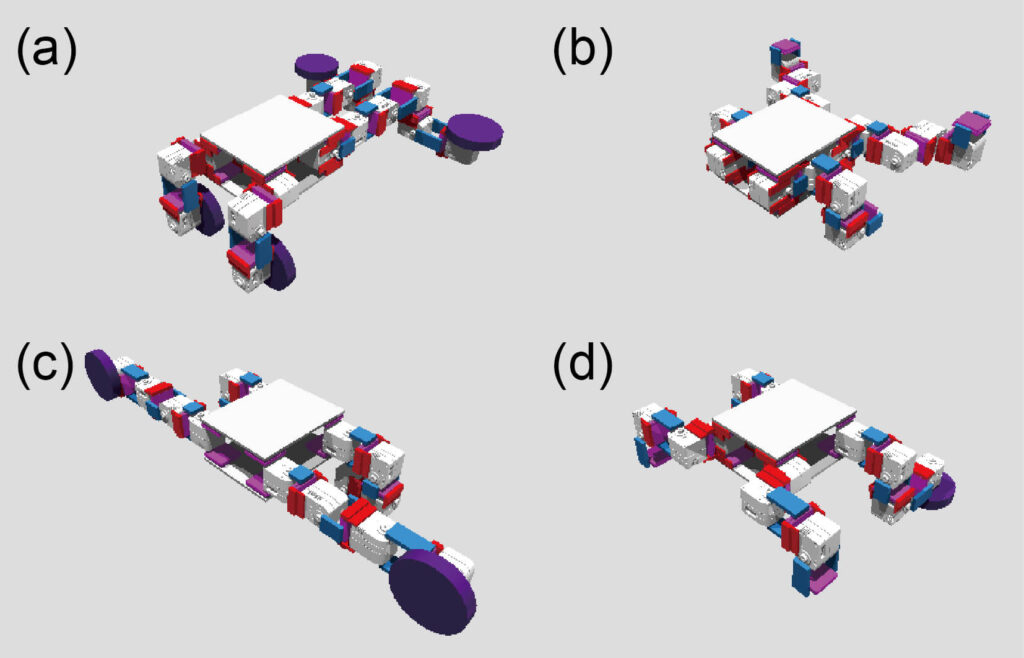
電動車椅子の研究は、“車椅子を使われている方が介助なしで外出できる範囲を広げること” をめざして、企業と共同で取り組んできたものです。
研究は、まずは「階をまたぐ移動をよりスムーズに行うために、エスカレーターに乗れる車椅子をつくる」「坂道や左右に傾斜のある道でも安全に進めるよう、座面を水平に保つ」といったコンセプトを立てることから始まります。
そこから、コンセプトを実現するために必要なメカニズムを考え出すことがとても重要です。

ある程度の目処が立ったら、今度は機械設計の専門家と一緒に「どのような部品を使うか」「各所の強度をどのように担保するか」とくわしい設計を進めて。
実際に車椅子ができ上がったら、今度はそれをうまく動かすために「ジョイスティックで行った操縦をどのように車体の動きに反映させるか」を考え、実験を繰り返しながらソフトウェアをつくっていきます。
この一連の過程を通して実現したのが、乗りものとしての安定性を保ちながら段差・隙間の乗り越えと傾斜のある歩道での水平走行ができる、搭乗型モビリティロボットです。

―カメラの研究についてもお聞かせください。
髙畑:ロボットによる生活支援を実現するためには、ロボットがカメラを使って周りの環境を正しく認識できるようにする必要があります。そこで取り組んでいるのが、ガラスを認識できるカメラをつくる研究です。
人間の目や脳であれば、ガラスを見て「ここに透明なガラスがある」と知覚し認識することができますが、通常のカメラが搭載されたロボットではガラスが見えず、窓や自動ドアにぶつかってしまうこともあります。
ここで着目したのが、遠赤外線です。遠赤外線とは、人の目に見える「可視光線」の赤色よりも波長が長い電磁波「赤外線」の一種のこと。
ガラスが透明に見えるのは、ガラスが可視光線を通すため向こう側が見えるからですが、一方で遠赤外線はガラスを通り抜けることができません。遠赤外線で写真を撮るとガラス部分は黒く映り、向こう側が見えない状態になるのです。
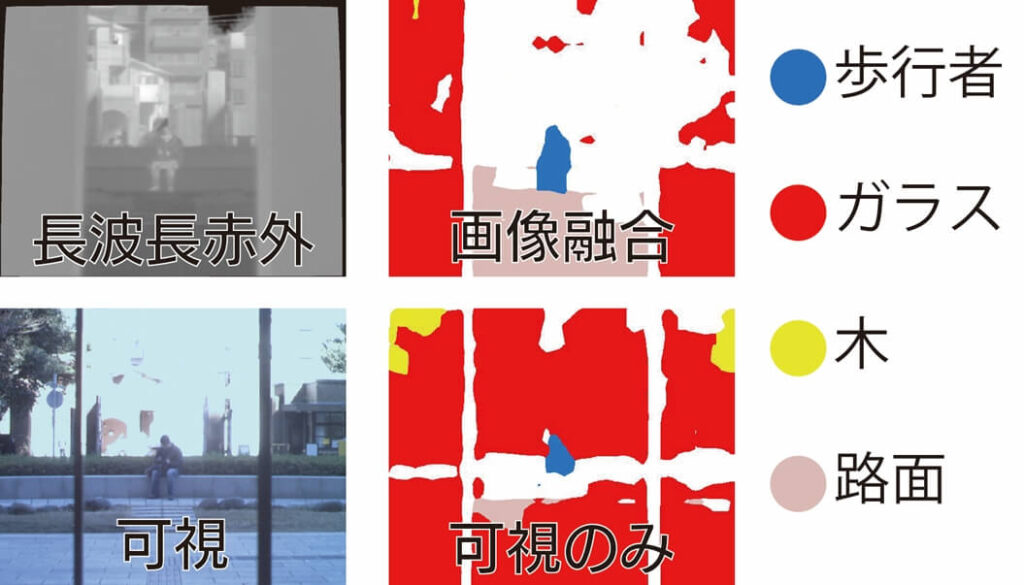
この電磁波の特性をふまえ、可視光線で撮影した画像と赤外線で撮影した画像をうまく組み合わせれば、「見えないけれどここに何かがありそうだ」とガラスの存在を感じとることができるだろうと考えました。
ただ、可視光線と赤外線で同時に撮影ができるカメラは現状ないため、可視光カメラと赤外線カメラをそれぞれ使う必要があります。しかしこの2台を並べて撮影すると、視点にズレが生じて見え方も異なってしまいますよね。
そこで、ふたつのカメラを組み合わせて同じ視点から撮影できるカメラをつくりました。

現在は、このカメラをロボットに搭載できる小さなサイズでつくること、そしてつくったカメラで実際に撮影した画像から「ガラスがありそうだ」とロボットに認識させることに取り組んでいます。
―研究の醍醐味は、どんなところにあると思いますか?
髙畑:誰かに与えられた仕事ではなく自分が「こんなことがしたい」「こんなものがあったらいいな」と思うテーマに取り組み、それを実際に形にできることがわたしの研究の醍醐味だと思っています。
「こんなロボットをつくれば生活支援が可能になるはずだ」とコンセプトを立てて計算やシミュレーションで実現可能性を示すだけでも、研究として成り立たせることはできます。ですが、わたしは “実際にものをつくって動かすことで誰かの役に立てる”、そこに興味を持ち面白さを感じているのかなと思います。
“発明” で人の役に立てるAIの実現を目指す
―研究において、今後チャレンジしたいことを教えてください。
髙畑:最近ではAIが文章を書いたり作曲したりできるようになってきましたが、わたしは人の役に立つAIは “発明” ができるようであってほしいと思っていて。今後は、機械の設計ができるAIの研究を進めたいと思っています。
例えば、悪路でもスムーズに移動できるロボットをつくるとなったときに、AIがシミュレーション上で試行錯誤をしながらたくさんのアイディアを生み出し、その中からどのメカニズムが最適かを選ぶことができるようになるといいなと。
この研究を通して、ロボットが人の生活の中にある困りごとを発見し・それを解決する機械をつくり出す、そんな “ロボットによる究極の生活支援” を実現できればと思います。
―実現に向けて、どんなことが課題になると思いますか?
髙畑:ランダムに機械のメカニズムをつくらせることは、仕組みさえ整えれば実現できると思いますが、生まれたアイディアすべてを一つひとつシミュレーション上で動かして性能を判断していくことは、非常に多くの時間がかかってしまい現実的ではないのかなと捉えています。
―先生が考える、その解決策とは?
髙畑:つくり出したメカニズムに対してAI自身で「これだと◯cmの段差が登れそう/登れなさそう」などと性能の見当をつけ、よさそうなものだけを選びとってシミュレーションで試す。そして、試した結果をふまえて性能の見当のつけ方を見直す……ということを繰り返せるとよいのかなと思うので、まずはこの性能の予測ができるAIを実現することに取り組んでいければと思います。
| 【この研究テーマに応用される知識】 高校までに学習する物理の中で、特に ■力学 ■光学 の知識が役立っています。 |
取材・文・写真=原田・髙畑・長・椋田研究室広報担当

